My first map (MFM)
In single particle analysis, the reconstruction process leading to the final 3D map generally often requires the use of an initial model or map. An efficient determination of this initial model is still an open and challenging problem. MFM offers three initial map estimation algorithms, such as e2initialmodel (Guang Tang et al, 2017, Ludtke, 2010), RANSAC (Vargas et al., 2014) and Significant (Sorzano et al., 2015), generating a gallery of initial model candidates. Naturally, many more algorithms to deal with the initial model problem have been proposed in the literature (reviewed in Sorzano et al., 2015), and the three selected ones are just an initial choice that can be enriched in subsequent versions of SWT.
Link: http://scipion.cnb.csic.es/m/myfirstmap
Tutorial
Embedded help guiding our users through the items to click (steps) to get an initial volume providing already data and finalized results (3 different datasets).
Workflow
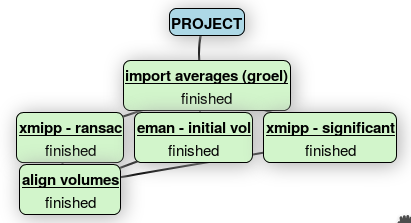
It starts by importing images, which most commonly refers to sets of 2D averages, and it follows with the different algorithms receiving the same averages as input data set . The workflow ends with the listing of all suggested Initial Maps, mutually aligned and ranked, result of merging the different volume/s generated by each of the different initial volume protocols (ransac, eman, xmipp-significant).